Sistema di riferimento globale.
Le grandezze statiche (carichi) e geometriche inserite in fase di input sono riferite ad un sistema di riferimento globale. Il sistema di riferimento globale utilizzato è il classico sistema di riferimento triortogonale. Rispetto a questo sistema di riferimento, le convenzioni utilizzate per la definizione dei carichi sono quelle rappresentate nella seguente figura.
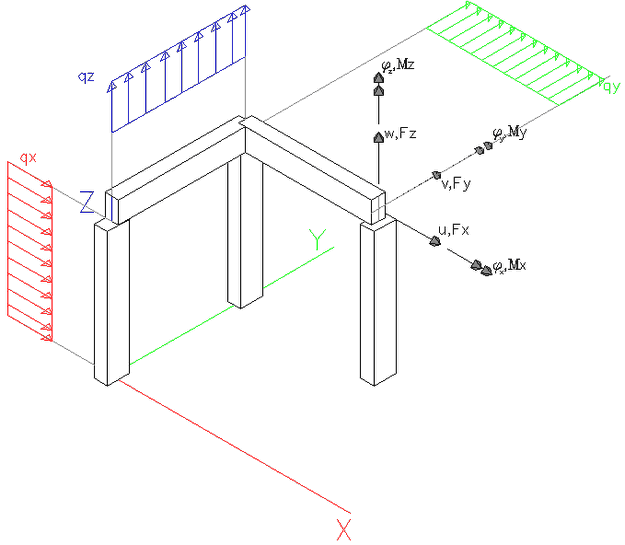
Sistema di riferimento globale
Sistema di riferimento locale.
Il sistema di riferimento locale è definito rispettando le seguenti regole:
-L’asse locale x è sempre coincidente con il versore che definisce la direzione della congiungente tra i due nodi dell’elemento;
-L’asse locale y è scelto in modo tale che sia rispettata l’ortogonalità rispetto all’asse x, fissando in modo opportuno il paramentro rimanente.
-L’asse locale z è ottenuto come prodotto vettoriale tra l’asse locale x e l’asse locale y (utilizzando quindi la classica regola della mano destra).
Nella figura che segue è mostrato come è definito il sistema di riferimento locale per i casi che si riscontrano più frequentemente:
-Elemento contenuto nel piano x-y, con direzione della congiungente tra i nodi in direzione x;
-Elemento contenuto nel piano x-y, con direzione della congiungente tra i nodi in direzione y;
-Elemento contenuto nel piano verticale x-z o y-z, con direzione della congiungente tra i nodi in direzione x;
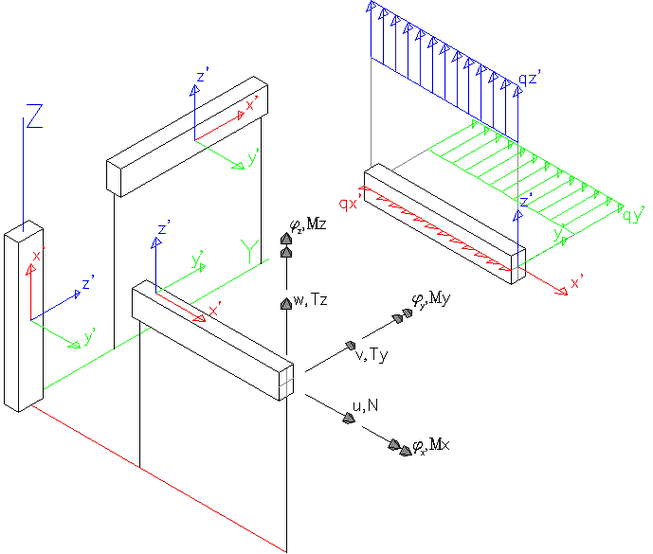
Sistema di riferimento locale.
Per interpretare in modo opportuno i risultati in termini di sollecitazioni è opportuno riferirsi alla figura precedente, in quanto le sollecitazioni sono definite rispetto al sistema di riferimento locale.
Inserimento delle caratteristiche inerziali della sezione (Jx, Jy).
I momenti di inerzia della sezione sono definiti rispettando le seguenti regole:
-Per gli elementi verticali le direzioni da prendere come riferimento sono quelle del sistema di riferimento globale. Quindi Jx è il momento di inerzia che la sezione dell’elemento offre intorno all’asse locale coincidente con l’asse x, mentre Jy è il momento di inerzia che la sezione dell’elemento offre intorno all’asse locale coincidente con l’asse y, mentre;
-Per gli elementi orizzontali Jy è il momento di inerzia che la sezione dell’elemento offre intorno all’asse locale contenuto nel piano x-y del sistema di riferimento globale, mentre Jx è il momento di inerzia che la sezione dell’elemento offre rispetto all’asse ortogonale rispetto a quello precedente.
© 2020 Geostru Software